(Currently, we are mainly focusing on energy storage & management and wireless power transfer. At the same time, we always prepare for new opportunities in this field.)
1. Background
The significance of vehicle electrification is far beyond replacing engines and oil tanks with electric motors and batteries. Especially, the motion of EVs is provided by wheels driven by electric motors. EVs are actually very typical mechatronic systems. In term of motion control, the uniqued advantages of electric motors over internal combustion engines and hydraulic braking systems can be summarized as follows:
- Far less complex dynamic model
- Faster torque response in milliseconds
- Easiness in obtaining accurate torque feedback
- Capability of generating both traction and braking forces
- Easiness in implementing distributed in-wheel-motor system
Consequently, the fundamental difference between electric motors and engines is that the electric motors can be used not only for mobile propulsion, but also as actuators and sensors due to their fast and accurate responses and relatively simple dynamic models. By making full use of the above unique advantages, advanced dynamics of EVs could be achieved with flexible and simplified configurations because the electric motors may replace the most of conventional vehicle dynamics control actuators.
2. Interests (please refer to our publications for details)
- Advanced electric vehicle longitudinal/lateral dynamics
- Stabilization of unstable vehicles
- Autonmous driving and formation control of multiple vehicles
3. Platforms
- Rear-wheel-drive electric vehicle using in-wheel motors (Figs. 1-4)
- Two in-wheel PMSM motors (1.5kW each)
- Labview-based embedded control system
- Feedback signal: wheel velocity, steering angle, motor current, etc.
- Two small central driven electric vehicles for the research on electric motor control-based active safety and autonomous driving, etc (Fig. 5).

Fig. 1. Rear-wheel-drive electric vehicle using in-wheel motors

Fig. 2. Two in-wheel motors of the rear-wheel-drive electric vehicle
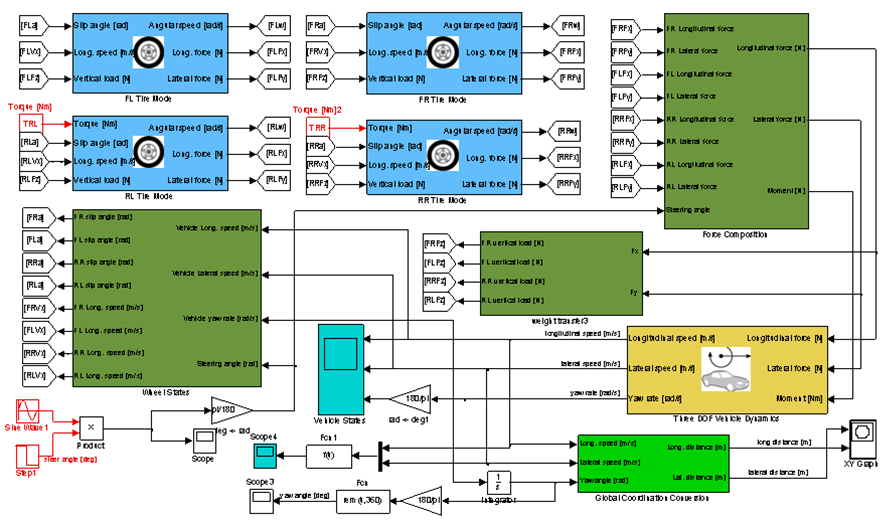
Fig. 3. Vehicle dynamics Simulink model
(a) (b)
Fig. 4. Vehicle dynamics control demonstration. (a) With Control. (b) Without Control.

Fig. 5. Two small central driven electric vehicles for the research on the electric motor control-based active safety and autonomous driving