(Currently, we are mainly focusing on energy storage & management and wireless power transfer. At the same time, we always prepare for new opportunities in this field.)
1. Background
The low-order controllers such as the PID-based controllers are still predominant in industry. Further improvements on the low-order controller design would be both theoretically and practically important. In DSC lab, we are working on the theoretical aspects of the so-called polynomial method, and its applications in various systems such as multi-mass system, inverted pendulum, and electro-magnetic suspension. Unlike the trial-and-error-based design techniques in classical control, transient responses can be explicitly addressed in polynomial method. In its design procedure, control configuration is defined at the beginning, and then controller parameters are determined under a specific assignment of characteristic ratios and generalized time constant. Therefore, polynomial method is suitable for low-order controller design.
2. Interests (please refer to our publications for details)
- Vibration suppression and disturbance rejection control of flexible systems
- Auto-tuning of control parameters
- Stabilization control of unstable structures
3. Platforms
- Multi-mass expermental system: include a torsion test bench, drivers and a RTLinux-based realtime control system (Figs. 1-2). The torsion test bench is used for the emulation of a two- or three-mass system (Fig. 1). The torsional system’s gear inertia, load inertia, shaft elastic coefficient, friction load, and gear backlash angle are adjustable.
- Doubel Inverted pendulum system: used as an example for the research on extending the polynomial method to design multi-input-multi-output control systems (Fig. 3).
- Demo electro-magnetic suspension system for maglev applications (Fig. 4).
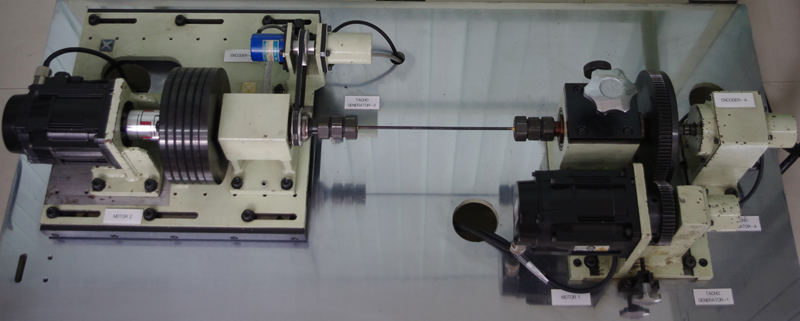
Fig. 1. Experimental setup of torsion test bench

Fig. 2. Experimental torsion system

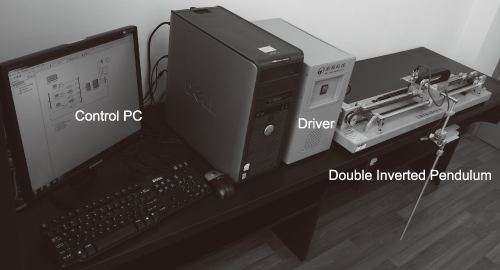
Fig. 3. Double inverted pendulum system
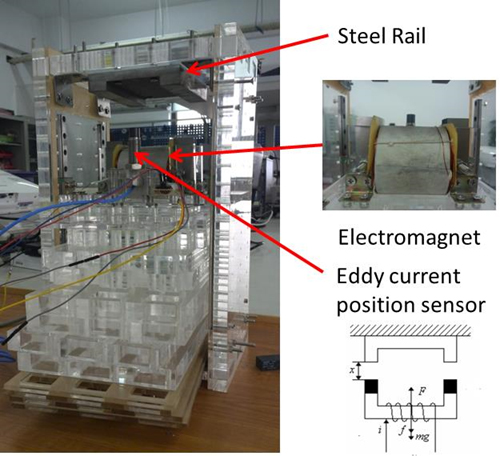
Fig. 4. A demo electromagnetic suspension system for maglev applications